
LATERAL ENGINE
R3DVi Robot 3D Vision
R3DVi is a 3D machine vision solution for locating objects in robot applications. It combines reliable and precise locating with streamlined integration into a system.
R3DVi package consists of two software applications:
In the Job Configurator application, a picking configuration (a Job) is defined with an easy-to-use graphical interface. Job Configurator is a separate desktop application, which allows it to be used away from the Runtime system, for example alongside mechanical design. Jobs can added into Runtime Job Collection quickly over network or simply using files.
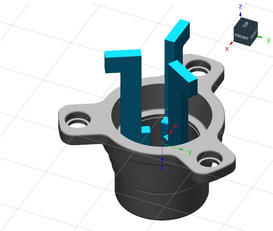
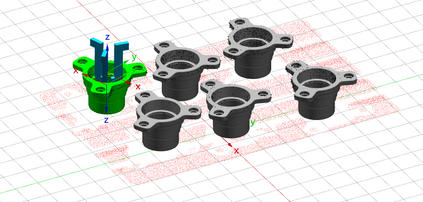
The main application (R3DVi Runtime), takes care of locating the objects and communicating with the robot (or other device). It has a touch-screen friendly graphical user interface that includes 3D visualization of the scanned scene and located objects. A one-time calibration procedure allows the results to be given in the desired robot coordinate system.
Features:
- Robot communication interface
- Calibration into robot coordinate system
- Importing object 3D models from CAD software
- 3D visualization
- Gripped object pose refinement
- Managing Jobs over network
- For locating objects in robot applications
- Robot communication interface
- Importing object 3D models from CAD software
- Gripped object pose refinement
- 3D scanner interface for e.g. Photoneo PhoXi scanners




Product description
R3DVi is a 3D machine vision solution for locating objects in robot applications. It combines reliable and precise locating with streamlined integration into a system.
R3DVi package consists of two software applications:
In the Job Configurator application, a picking configuration (a Job) is defined with an easy-to-use graphical interface. Job Configurator is a separate desktop application, which allows it to be used away from the Runtime system, for example alongside mechanical design. Jobs can added into Runtime Job Collection quickly over network or simply using files.
The main application (R3DVi Runtime), takes care of locating the objects and communicating with the robot (or other device). It has a touch-screen friendly graphical user interface that includes 3D visualization of the scanned scene and located objects. A one-time calibration procedure allows the results to be given in the desired robot coordinate system.
Features:
- Robot communication interface
- Calibration into robot coordinate system
- Importing object 3D models from CAD software
- 3D visualization
- Gripped object pose refinement
- Managing Jobs over network
Related

Strategic agreement between OEM Automatic and KUKA Nordic
The strategic partnership between OEM Automatic and KUKA Nordic is driving sales momentum. Read more!

OEM Automatic now sells world leading cobots
Thanks to the new cooperation between OEM and KUKA Nordic, we are now able to offer our customers state-of-the-art cobots! Read more about the cooperation!

Push-In sockets that save both time and space
ComatReleco has launched a new series of push-in sockets specifically designed for time and space savings.
Fiepos — The power supply of the future
The need for flexible, modular systems shapes machine and system engineering. Decentralization of the system components has proven to be an important factor for success.

New “all-round” Syr-Line time relays by Crouzet
Crouzet has honoured the strong Syrelec time relay traditions established in the 1980s, first by Cronos and Cronos 2 series. Now, Crouzet presents the compact and extremely versatile Syr-Line series.

2D laser scanners
The Hokuyo 2D laser scanners measure the distance between the scanner and the environment. The scanner can detect size, location and target movement direction based on target scanning data.

