LATERAL ENGINE
R3DVi Robot 3D Vision
R3DVi is a 3D machine vision solution for locating objects in robot applications. It combines reliable and precise locating with streamlined integration into a system.
R3DVi package consists of two software applications:
In the Job Configurator application, a picking configuration (a Job) is defined with an easy-to-use graphical interface. Job Configurator is a separate desktop application, which allows it to be used away from the Runtime system, for example alongside mechanical design. Jobs can added into Runtime Job Collection quickly over network or simply using files.
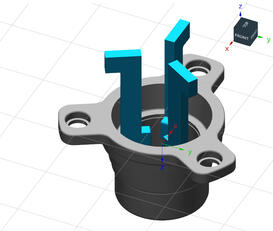
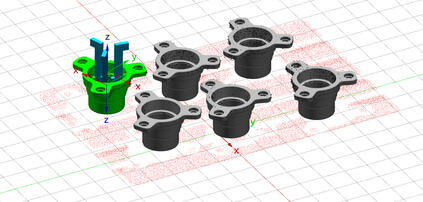
The main application (R3DVi Runtime), takes care of locating the objects and communicating with the robot (or other device). It has a touch-screen friendly graphical user interface that includes 3D visualization of the scanned scene and located objects. A one-time calibration procedure allows the results to be given in the desired robot coordinate system.
Features:
- Robot communication interface
- Calibration into robot coordinate system
- Importing object 3D models from CAD software
- 3D visualization
- Gripped object pose refinement
- Managing Jobs over network
- For locating objects in robot applications
- Robot communication interface
- Importing object 3D models from CAD software
- Gripped object pose refinement
- 3D scanner interface for e.g. Photoneo PhoXi scanners



Product description
R3DVi is a 3D machine vision solution for locating objects in robot applications. It combines reliable and precise locating with streamlined integration into a system.
R3DVi package consists of two software applications:
In the Job Configurator application, a picking configuration (a Job) is defined with an easy-to-use graphical interface. Job Configurator is a separate desktop application, which allows it to be used away from the Runtime system, for example alongside mechanical design. Jobs can added into Runtime Job Collection quickly over network or simply using files.
The main application (R3DVi Runtime), takes care of locating the objects and communicating with the robot (or other device). It has a touch-screen friendly graphical user interface that includes 3D visualization of the scanned scene and located objects. A one-time calibration procedure allows the results to be given in the desired robot coordinate system.
Features:
- Robot communication interface
- Calibration into robot coordinate system
- Importing object 3D models from CAD software
- 3D visualization
- Gripped object pose refinement
- Managing Jobs over network
Related

Small but very efficient gear motors
Transtecno has developed the MiniTecno product range to better meet the needs of customers using small gear motors in a wide range of industries, up to 90 Nm.

Products for hygienic applications
WIKA's hygienic products take into account the high hygiene, cleaning, and durability requirements of the food and pharmaceutical industries. Read more!

Molex mPm valve connectors with WSOR cable
Molex mPm valve plug cables are now also available with WSOR cables. Read more!

New connectors products from Harting
HARTING has introduced a new Push-In connection technology that can reduce assembly times by up to 30% and improve installation flexibility. Read more!

TFT-displays for indoor and outdoor solutions
Constantly evolving applications place ever greater demands on user interfaces. A display for presenting information on the device itself is usually the most natural choice. Read more!

Bopla BoVersa: optimal enclosure for IIoT environments
Comprising three parts, BoVersa can be extensively customized in terms of materials, such as metal and plastic, and colors. It is also easy to integrate various stylish display and keyboard solutions.
